
Applied Science Manager (Computer Vision)
Sai Krishna Bashetty
Pioneering the future of retail video analytics, automated systems, and safe autonomous vehicles through advanced Computer Vision and AI.
About Me
I am an Applied Science Manager with over 6 years of experience pioneering the future of Retail Video Analytics and Autonomous Systems. Currently at RadiusAI, I lead cross-functional teams to build and deploy ShopAssist, an industry-leading frictionless checkout solution.
My expertise lies in translating state-of-the-art Computer Vision research into scalable, edge-optimized commercial products. I have successfully architected systems that handle thousands of SKUs in real-time, drastically reducing shrink and enhancing customer experience for major retailers.
With a Master's in Computer Engineering from Arizona State University, my background is rooted in rigorous academic research—from simulating autonomous vehicle crash scenarios (published in IEEE ICRA) to developing novel multi-camera tracking algorithms. I hold multiple patents in visual tracking and automated checkout technologies.
6+
Years Experience
4+
Patents Granted/Pending
IEEE
Published Research
Technical Expertise
Professional Experience
Data Science Manager (Computer Vision)
RadiusAI
Leading the Applied Science and Computer Vision initiatives for ShopAssist, a flagship frictionless checkout solution. My work focuses on bridging the gap between cutting-edge AI research and scalable, real-world retail products.
- ShopAssist & Pulse Analytics: Spearheading the development of vision-based self-checkout systems (ShopAssist) and store-wide analytics (Pulse). These systems leverage multi-camera tracking and deep learning to reduce shrink, optimize inventory, and enhance customer throughput.
- Edge AI Optimization: deploying complex Deep Learning models on edge compute devices (utilizing AMD/Intel stacks) to achieve real-time inference with minimal latency, ensuring a seamless checkout experience.
- Scalable Computer Vision: Architected systems capable of recognizing thousands of unique SKUs and handling "unknown" items through robust detection pipelines, directly addressing the long-tail problem in retail object detection.
- Unsupervised Learning Pipeline: Strategized and implemented unsupervised methods to automate data annotation using POS ground truth, accelerating model training cycles by 10x and significantly reducing operational costs.
Masters in Computer Engineering
Arizona State University
Specialized in novel methods for building and testing safe autonomous vehicle systems using state-of-the-art Computer Vision methods.
- Thesis on simulation of real-world automotive crash scenarios.
- Published work in IEEE ICRA conference.
Patents & Innovations
Intellectual property driving the next generation of retail automation and computer vision.
Automatic item identification during assisted checkout based on visual features
RadiusAI, Inc. • Issued April 2025
Systems and methods for extracting item parameters from images at a POS system to identify items by matching feature vectors against a database.
Point of sale station for assisted checkout system
RadiusAI, Inc. • Issued Feb 2025
Assisted checkout devices utilizing computer vision and machine learning to accelerate the checkout process with optical sensors and support towers.
System and method for visually tracking persons and imputing demographic and sentiment data
RadiusAI, Inc. • Issued 2024
Multi-camera visual tracking system that maintains coherent track identity across locations to determine demographics and sentiment for actionable insights.
Automatic Item Recognition From Captured Images
RadiusAI, Inc. • Published July 2024
Advanced methods for streaming parameters of unidentified items to a database for future recognition and rapid model adaptation.
Publications & Research
Peer-reviewed research and contributions to the field of Computer Vision and Autonomous Systems.
DeepCrashTest: Turning Dashcam Videos into Virtual Crash Tests for Automated Driving Systems
S. K. Bashetty, H. B. Amor, and G. Fainekos
A novel AI framework that transforms standard dashcam footage into simulated crash scenarios. This work enables rigorous safety testing of autonomous vehicle systems by automatically generating adversarial trajectories from real-world accident data, significantly reducing the gap between simulation and reality.
Key Projects & Achievements
A selection of pioneering work in deployed AI systems and academic research.

Vision-Based Assisted Checkout
Led the creation of an AI-powered checkout system using computer vision to automatically identify and process items. This system minimizes manual scanning, accelerates transactions, and uses proprietary algorithms robust to occlusions and lighting changes.
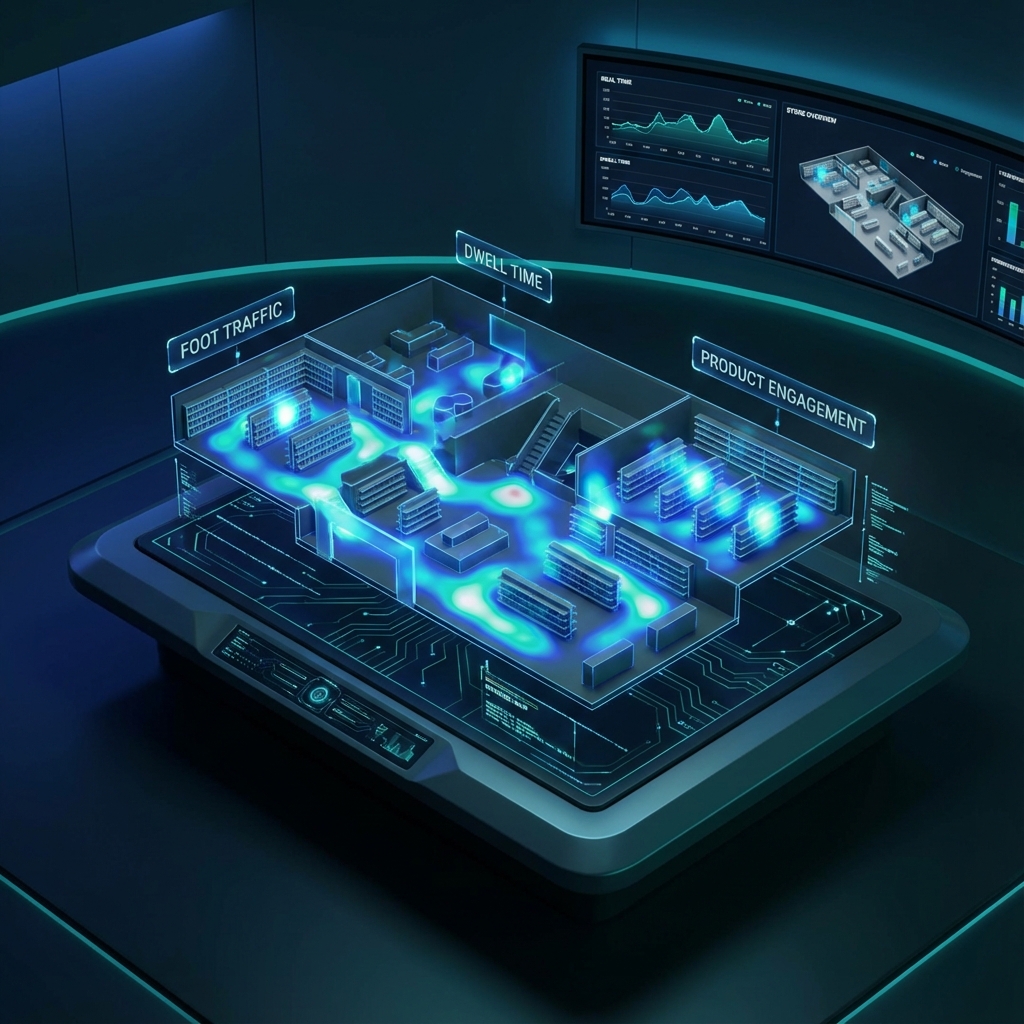
Retail Analytics Platform
Developed a platform providing real-time insights into customer behavior and store performance. Includes novel multi-camera tracking and online calibration algorithms to map customer journeys without expensive infrastructure.

Healthcare Screening System
Innovated a non-contact screening solution using infrared thermal cameras and gesture recognition. The multi-modal system predicts accurate body temperatures and was crucial during the COVID pandemic for hospital safety.
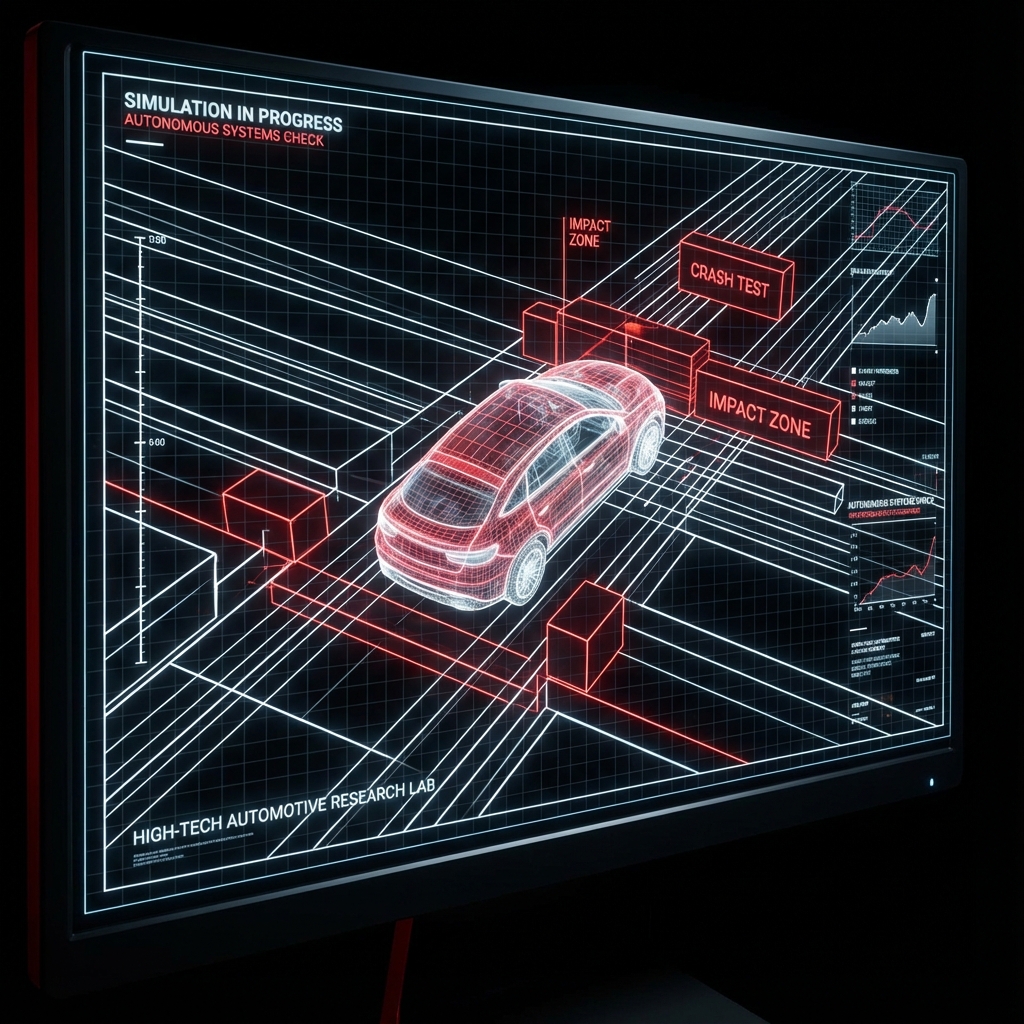
Autonomous Safety Simulation
Designed a simulation framework to test autonomous vehicle safety by analyzing dash cam videos. Generates adversarial crash scenarios to rigorously test collision avoidance systems, published at IEEE ICRA.